Plastikinio antgalio ritės svyravimo ribinis jungiklis

-

Tvirtas korpusas
-

Patikimas veiksmas
-

Patobulintas gyvenimas
Produkto aprašymas
„Renew“ RL8 serijos miniatiūriniai ribiniai jungikliai pasižymi padidintu patvarumu ir atsparumu atšiaurioms aplinkoms, jų mechaninis tarnavimo laikas siekia iki 10 milijonų jungimų. Dėl to jie idealiai tinka kritinėms ir sunkioms reikmėms, kur standartinių bazinių jungiklių nepakanka. Dėl lanksčios spyruoklinės koto ritės svyruojantys ribiniai jungikliai gali būti valdomi įvairiomis kryptimis (išskyrus ašines kryptis), taip prisitaikant prie nesuderinamumo. Jie puikiai tinka aptikti objektus, artėjančius iš įvairių kampų. Įvairioms reikmėms tiekiami plastikiniai ir vieliniai antgaliai.
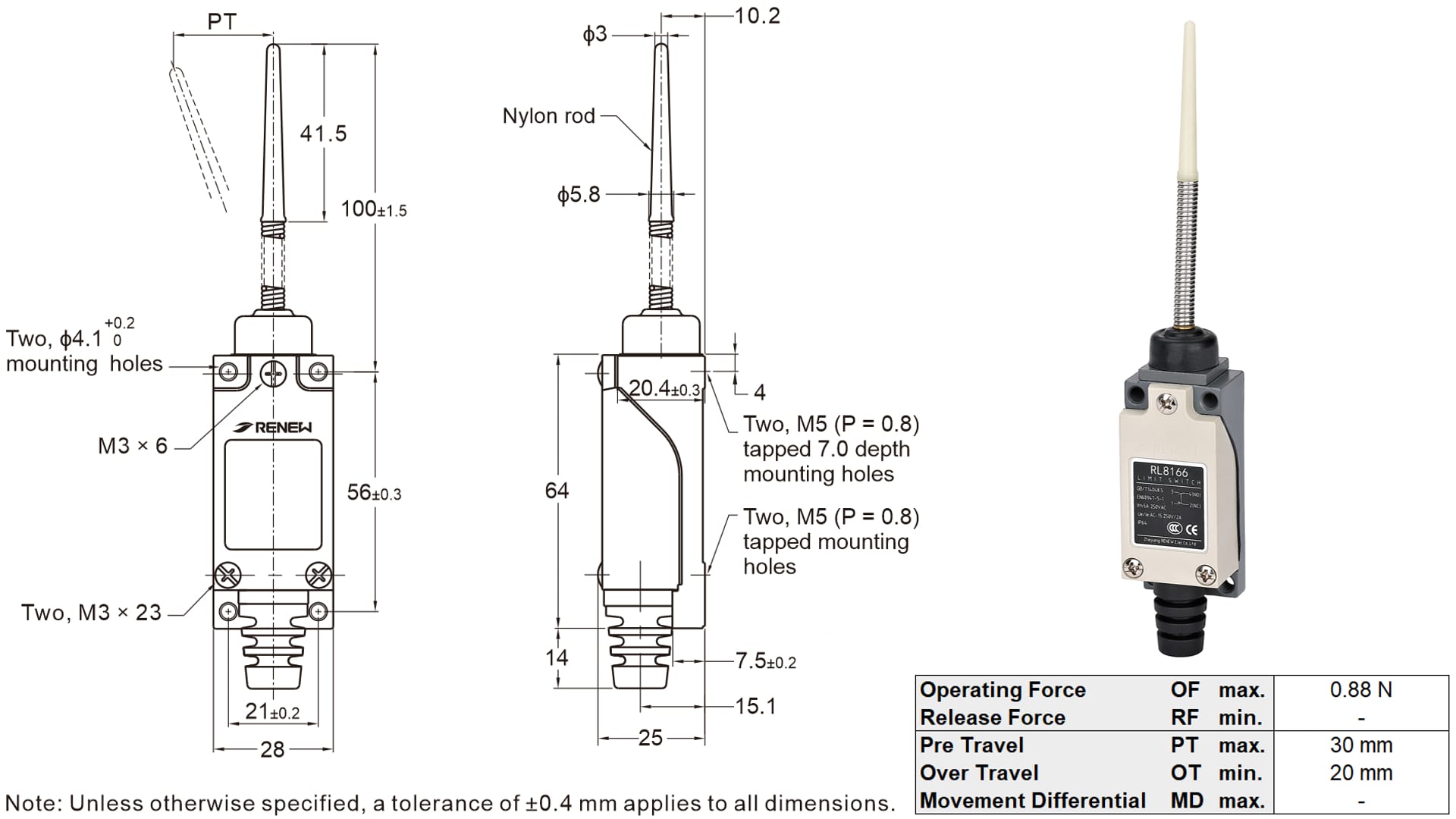
Matmenys ir veikimo charakteristikos
Bendrieji techniniai duomenys
| Amperų įvertinimas | 5 A, 250 V kintamoji srovė |
| Izoliacijos varža | 100 MΩ min. (esant 500 V nuolatinei įtampai) |
| Kontaktinis pasipriešinimas | 25 mΩ maks. (pradinė vertė) |
| Dielektrinis stiprumas | Tarp to paties poliškumo kontaktų 1000 V kintamoji srovė, 50/60 Hz 1 min. |
| Tarp srovę tekančiųjų metalinių dalių ir žemės, ir tarp kiekvieno gnybto bei srovės netekančių metalinių dalių 2000 V kintamoji srovė, 50/60 Hz 1 min. | |
| Atsparumas vibracijai gedimo atveju | 10–55 Hz, 1,5 mm dviguba amplitudė (gedimas: maks. 1 ms) |
| Mechaninis tarnavimo laikas | Mažiausiai 10 000 000 operacijų (120 operacijų/min.) |
| Elektros tarnavimo laikas | Mažiausiai 300 000 srovių (esant vardinei varžos apkrovai) |
| Apsaugos laipsnis | Bendrosios paskirties: IP64 |
Paraiška
„Renew“ miniatiūriniai ribiniai jungikliai atlieka labai svarbų vaidmenį užtikrinant įvairių įrenginių saugumą, tikslumą ir patikimumą skirtingose srityse. Čia pateikiami keli populiarūs arba galimi jų pritaikymai.

Sandėlio logistika ir procesai
Šiuolaikiniuose sandėliuose ir gamyklose šie ribiniai jungikliai gali būti naudojami pakavimo mašinose, siekiant aptikti netaisyklingos formos pakuotes, judančias konvejeriu. Lankstus strypas sulenkiamas pagal pakuotės formą, suaktyvindamas jungiklį. Jie taip pat gali būti naudojami robotikoje ir automatinėse sistemose, siekiant aptikti robotinių rankų ar judančių dalių galines padėtis, kurios ne visada idealiai sutampa.
Produktų kategorijos
-

Skydinio montavimo stūmoklio pagrindinis jungiklis
-

Vyrio svirties horizontalus ribinis jungiklis
-

Sandarus ritininio stūmoklio ribinis jungiklis
-

Mažos jėgos vielinio vyrio svirties pagrindinis jungiklis
-

Ilgas vyrio svirties miniatiūrinis pagrindinis jungiklis
-

Spyruoklinio stūmoklio horizontalus ribinis jungiklis







